三维空间变换
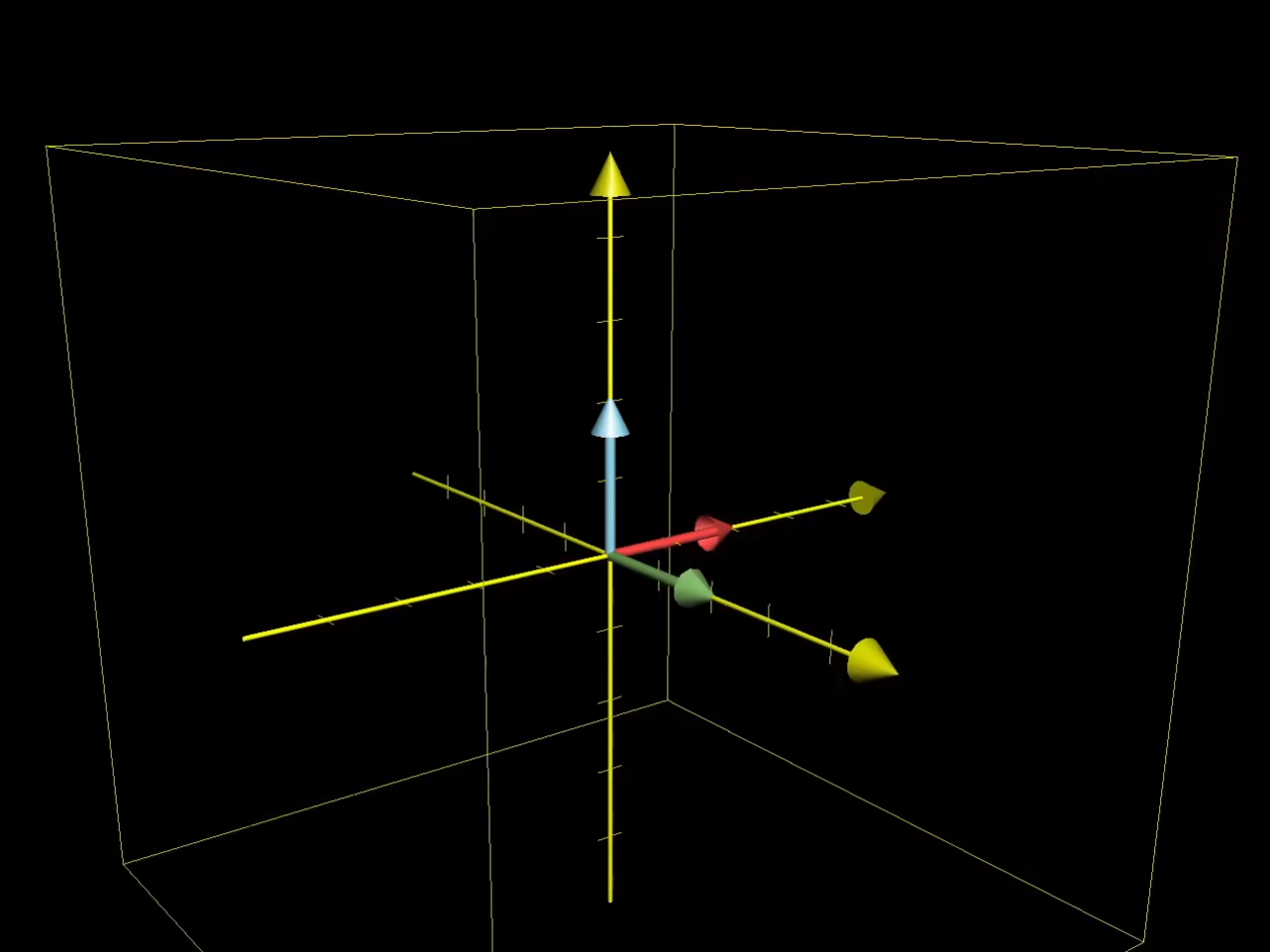
变换前的基向量
$$
\begin{bmatrix}
1&0&0\\
0&1&0\\
0&0&1
\end{bmatrix}
$$
输入一个三维向量,输出一个三维向量。
变换后的基向量
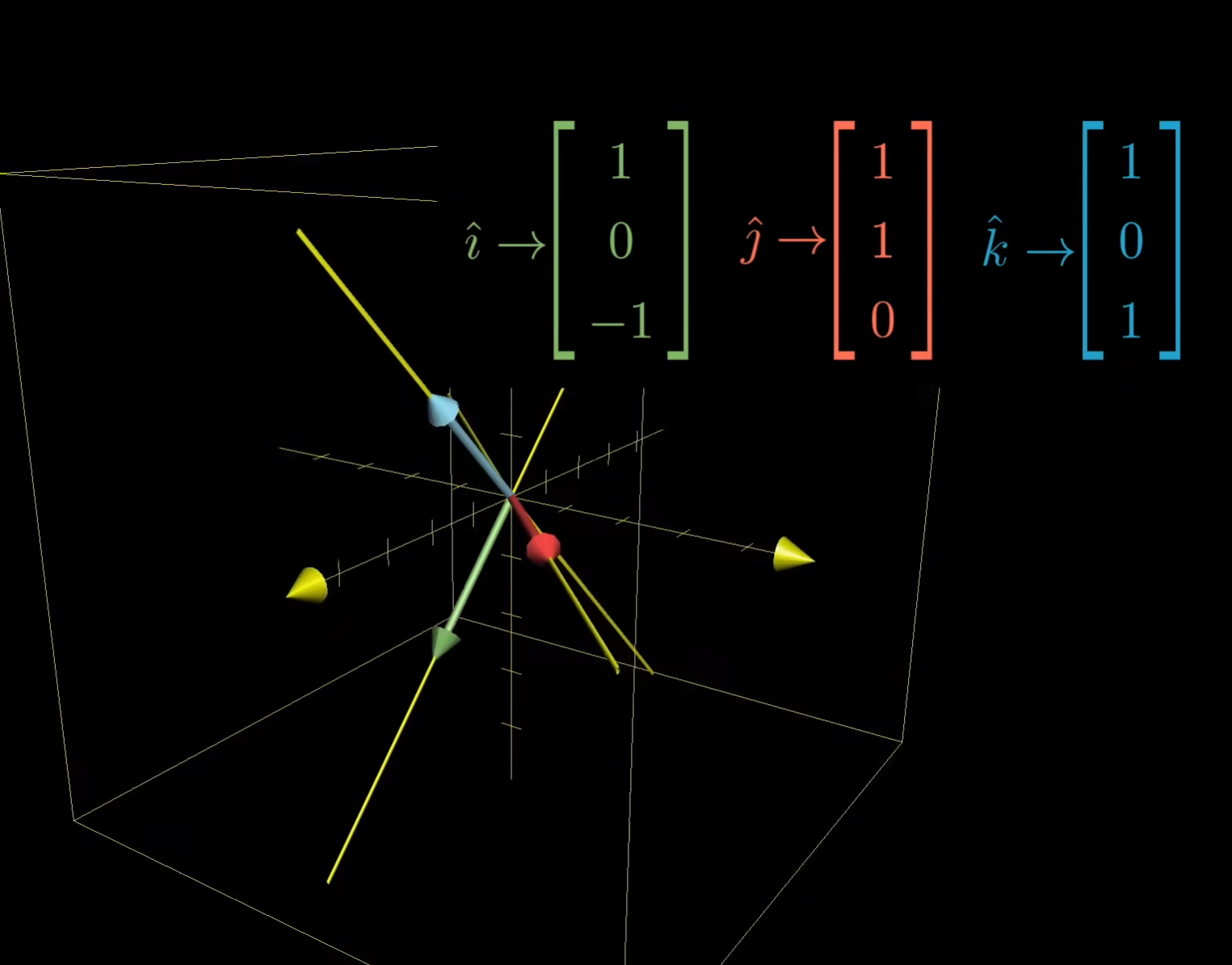
$$
\begin{bmatrix}
1&1&1\\
0&1&0\\
-1&0&1
\end{bmatrix}
$$
这个矩阵描述了一个线性变换
在三维空间里面,我们同样使用基向量,x代表i-hat,y代表j-hat, z代表k-hat。
所以,三维空间中的线性变换的计算方式和二维空间中的类似。